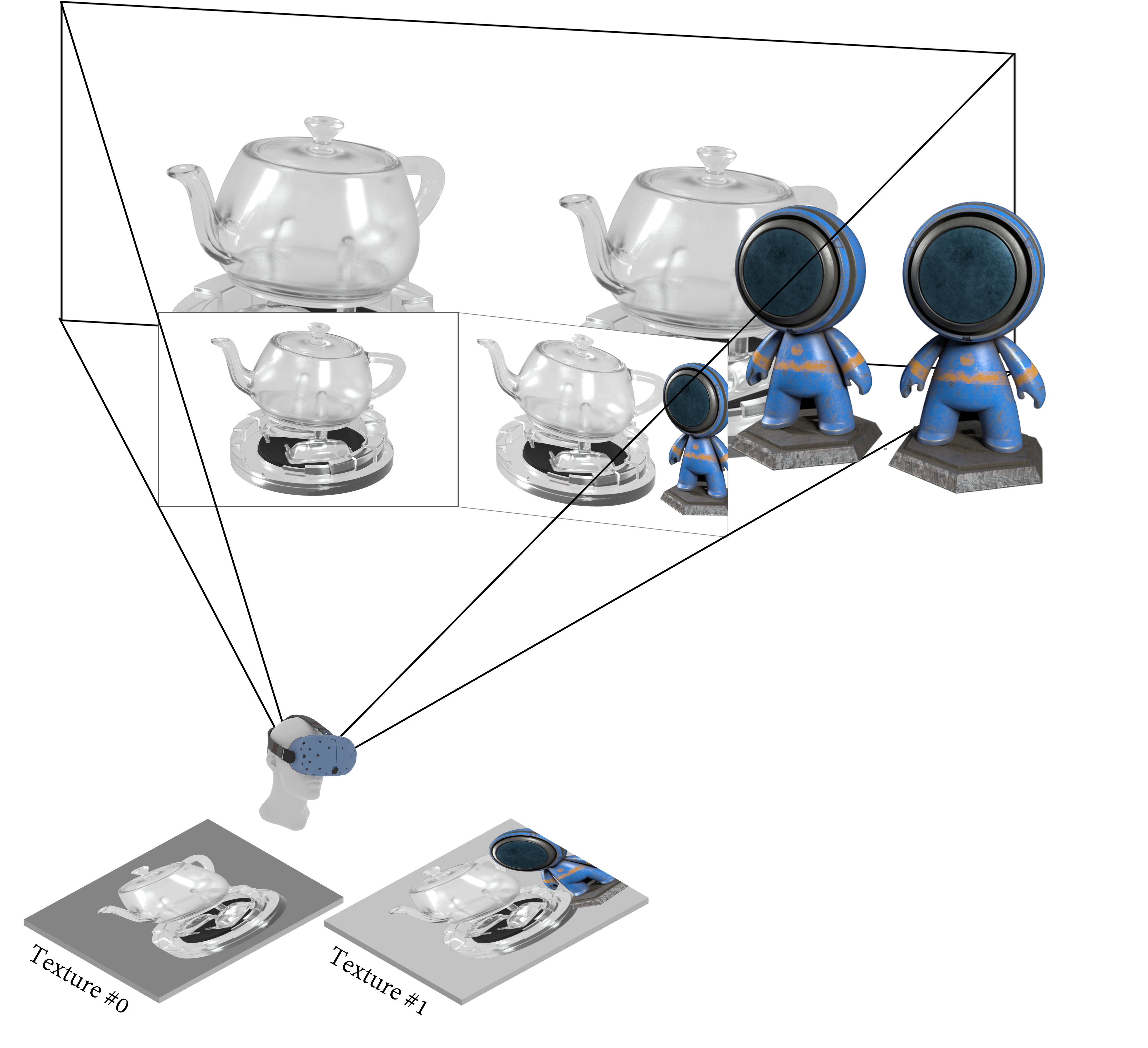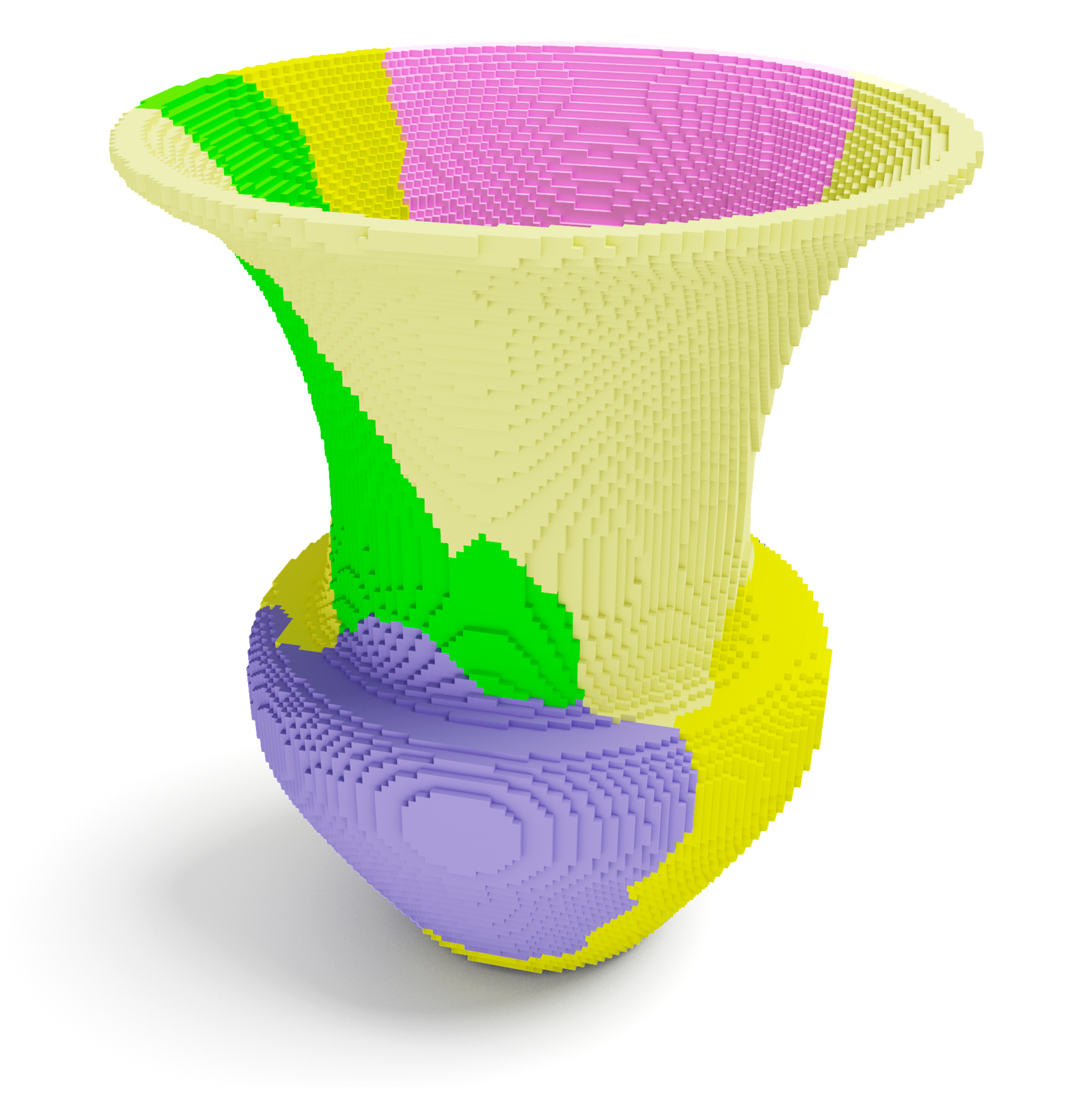
Virtualized Point Cloud Rendering
Published in IEEE Transactions on Visualization and Computer Graphics, 2025, Q1 (Impact Factor: 6.5).

Published in IEEE Transactions on Visualization and Computer Graphics, 2025, Q1 (Impact Factor: 6.5).
Published in ISPRS Journal of Photogrammetry and Remote Sensing, 2025, Q1 (Impact Factor: 11.774).
Published in Computers & Graphics, 2024, Q1 (Impact Factor: 2.8).
Article | Download PDF | Download Bibtex | Project page | Download dataset
Published in Applied Energy, 2024, Q1 (Impact Factor: 10.1).
Published in Remote Sensing, 2024, Q1 (Impact Factor: 4.1).
Published in Virtual Reality, 2024, Q1 (Impact Factor: 4.4).
Published in Remote Sensing, 2024, Q1 (Impact Factor: 4.1).
Article | Download PDF | Download Bibtex | Download dataset | Code
Published in Remote Sensing, 2023, Q1 (Impact Factor: 4.2).
Published in Archaeological and Anthropological Sciences, 2023, Q2 (Impact Factor: 2.1).
Published in Computers and Electronics in Agriculture, 2023, Q1 (Impact Factor: 7.7).
Published in Automation in Construction, 2023, Q1 (Impact Factor: 9.6).
Published in ISPRS Journal of Photogrammetry and Remote Sensing, 2023, Q1 (Impact Factor: 12.7).
Published in Computers & Graphics, 2022, Q2 (Impact Factor: 2.5).
Published in IEEE Transactions on Geoscience and Remote Sensing, 2022, Q1 (Impact Factor: 8.2).
Published in Remote Sensing, 2022, Q1 (Impact Factor: 5.0).
Published in International Journal of Applied Earth Observation and Geoinformation, 2022, Q1 (Impact Factor: 7.5).
Published in Frontiers in Environmental Science, 2022, Q2 (Impact Factor: 4.6).
Published in ISPRS Journal of Photogrammetry and Remote Sensing, 2021, Q1 (Impact Factor: 11.774).
Published in International Journal of Applied Earth Observation and Geoinformation, 2021, Q1 (Impact Factor: 7.5).
Published in 41st European Photovoltaic Solar Energy Conference and Exhibition, 2024, Non-rated.
Published in 19th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2024), 2024, Core:B.
Published in IGARSS - IEEE International Geoscience and Remote Sensing Symposium, 2022, CORE:C.
Published in Eurographics - Posters, 2022, CORE:A.
Published in Congreso Español de Informática Gráfica (CEIG), 2022, National.
Published in Congreso Español de Informática Gráfica (CEIG), 2022, National.
Published in Congreso Español de Informática Gráfica (CEIG), 2021, National.
Published in Congreso Español de Informática Gráfica (CEIG), 2021, National.
Published in Congreso Español de Informática Gráfica (CEIG), 2019, National.
Published in RUJA: Repositorio Institucional de Producción Científica de la Universidad de Jaén, 2023, PhD Dissertation (Computer Science).
Published in CREA: Colección de Recursos Educativos Abiertos de la Universidad de Jaén, 2021, M.S. Thesis (Computer Science).
Published in CREA: Colección de Recursos Educativos Abiertos de la Universidad de Jaén, 2019, B.S. Thesis (Computer Science).