Simulación de escaneados 3D
Published in CREA: Colección de Recursos Educativos Abiertos de la Universidad de Jaén, 2021
Supervisors: Carlos-Javier Ogáyar-Anguita, Francisco-Ramón Feito-Higueruela
Abstract
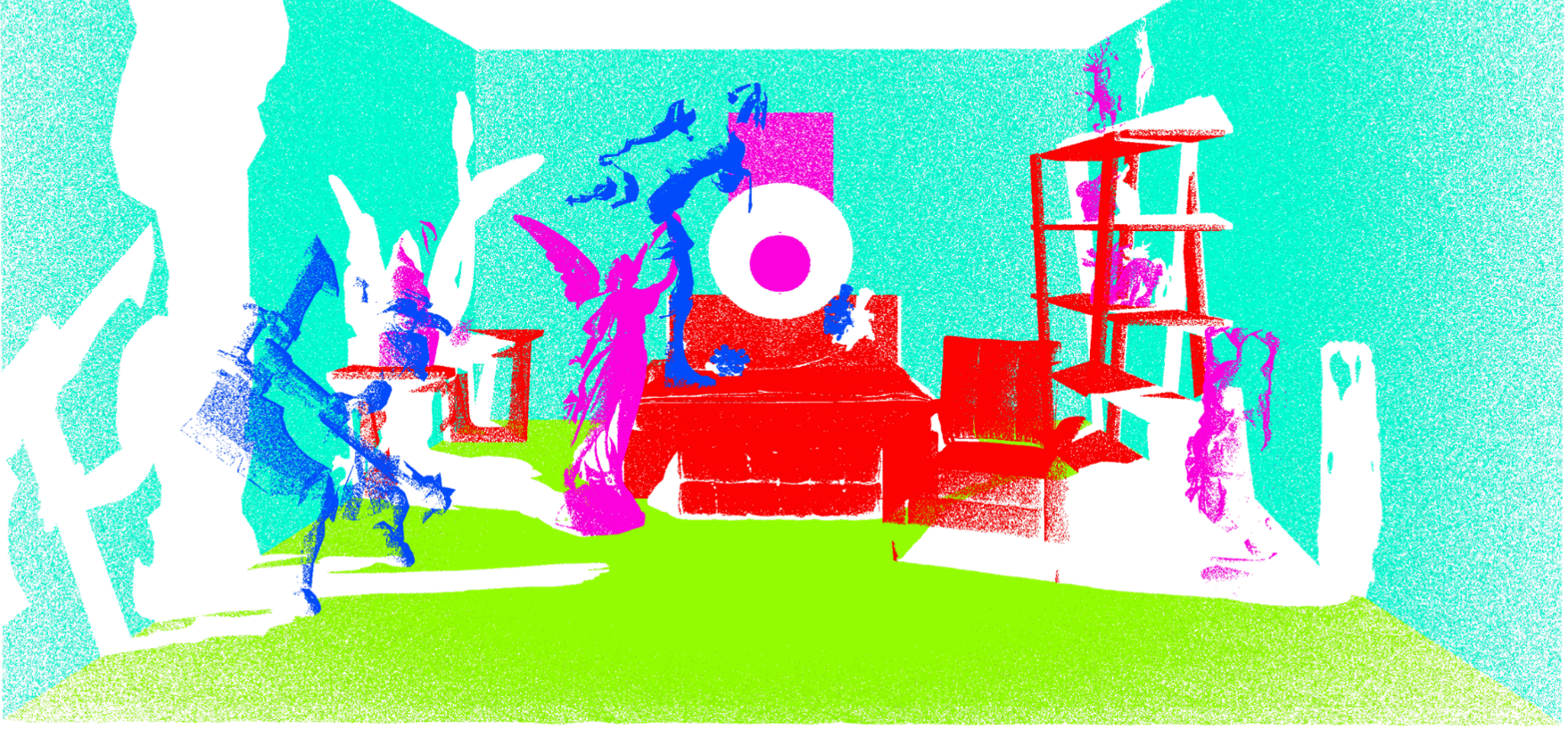
Las nubes de puntos 3D procedentes de un sensor LiDAR se utilizan en un número considerable de aplicaciones: desde la preparación y verificación de trabajos de campo, a tareas relacionadas con la inteligencia artificial, como puede ser la conducción autónoma o el entrenamiento de sistemas robóticos. Sin embargo, su obtención representa un coste económico y temporal, y más allá de la adquisición, se observa un número muy reducido de conjuntos de datos etiquetados aplicables a tareas de machine learning y de visión por computador. Además, es común encontrar nubes de puntos cuyas etiquetas se reducen a unas pocas clases, que incluso se asignan manualmente, lo que implica que podrían existir errores en el proceso de etiquetado, más allá del limitado nivel de detalle existente. Por tanto, la simulación de un sensor LiDAR sobre un escenario 3D modelado permite obtener nubes de puntos sintéticas, correctamente etiquetadas, con clases ajustadas a un escenario concreto, y con un nivel de detalle personalizado. Por otro lado, la generación de nubes de puntos en gran cantidad puede obtenerse como consecuencia de la introducción de escenarios procedurales. El comportamiento físico del sensor hace que este problema pueda representar una elevada carga de trabajo. Por tanto, la introducción de la computación paralela puede ayudar a reducir el tiempo de respuesta del proceso de escaneo. Además, la simulación del sensor no sólo incluye una generación básica de una nube de puntos, sino también la introducción de aquellos errores más comunes vinculados a un dispositivo LiDAR, con el fin de reproducir de la manera más fiel posible su comportamiento.
Recommended citation (BibTeX)
Loading BibTeX...