Guided Modeling of Natural Scenarios: Vegetation and Terrain
Published in Congreso Español de Informática Gráfica (CEIG), 2022
Abstract
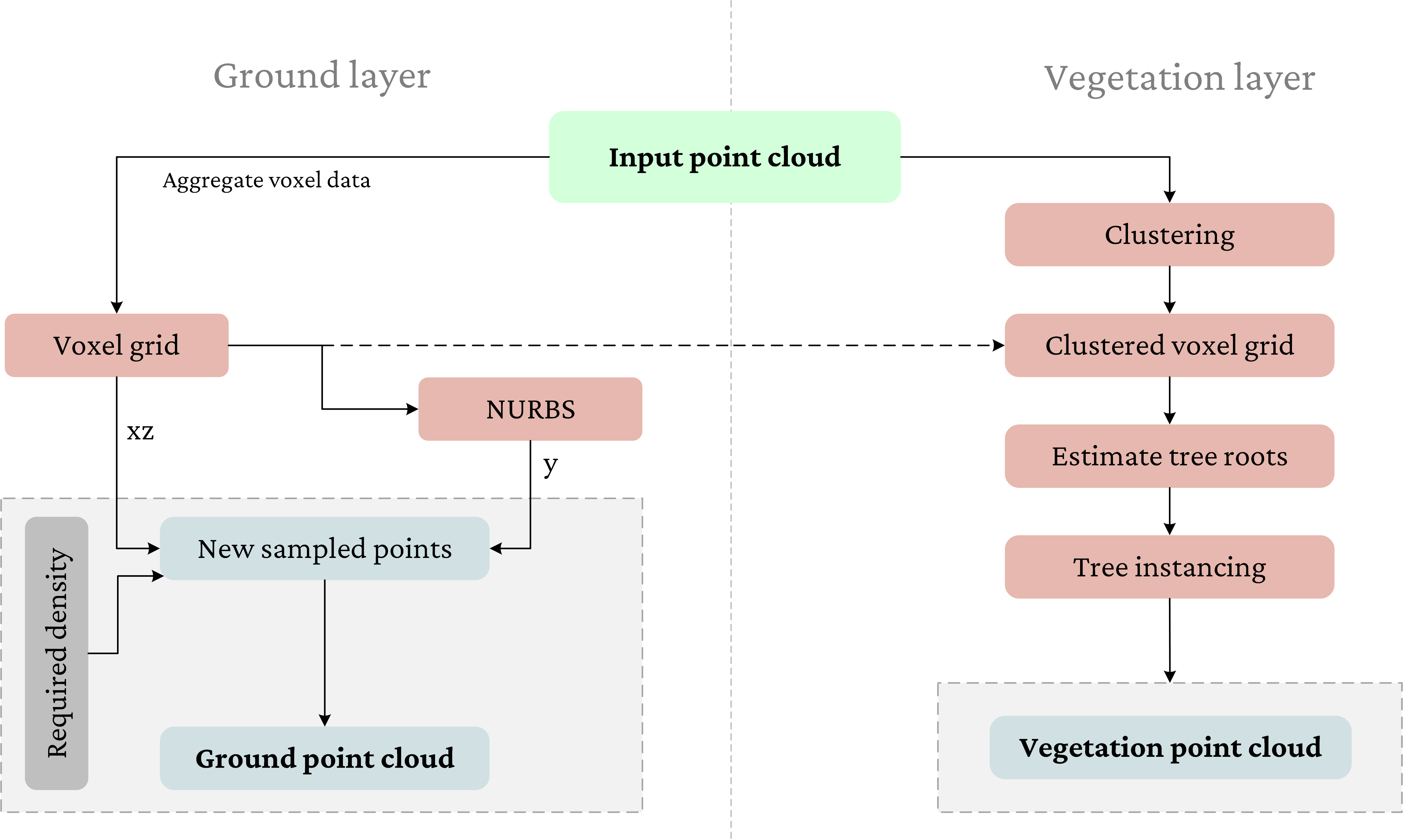
The generation of realistic natural scenarios is a longstanding and ongoing challenge in Computer Graphics. LiDAR (Laser Imaging Detection and Ranging) point clouds have been gaining interest for the representation and analysis of real-world scenarios. However, the output of these sensors is conditioned by several parameters, including, but not limited to, distance to scanning target, aperture angle, number of laser beams, as well as systematic and random errors for the acquisition process. Hence, LiDAR point clouds may present inaccuracies and low density, thus hardening their visualization. In this work, we propose reconstructing the surveyed environments to enhance the point cloud density and provide a 3D representation of the scenario. To this end, ground and vegetation layers are detected and parameterized to allow their reconstruction. As a result, point clouds of any required density can be modeled, as well as 3D realistic natural scenarios that may lead to procedural generation through their parameterization.
Recommended citation (BibTeX)
Loading BibTeX...