Experimentación en framework para redes neuronales con diferentes conjuntos de datos LiDAR reales y sintéticos
Thesis overview
Author: Víctor Rodríguez-Cano
Supervision: Rafael-Jesús Segura-Sánchez, Alfonso López-Ruiz
Degree: Master's Degree in Computer Science
Institution: University of Jaén, Department of Computer Science
Defense: December 2024
Final grade: 10/10 (with honors)
Abstract
Nowadays, machine learning is being applied across many sectors to solve a wide range of problems in engineering, architecture, medicine, archaeology, geomatics, and related fields. However, training these machine learning models requires a large amount of properly processed and labeled data.
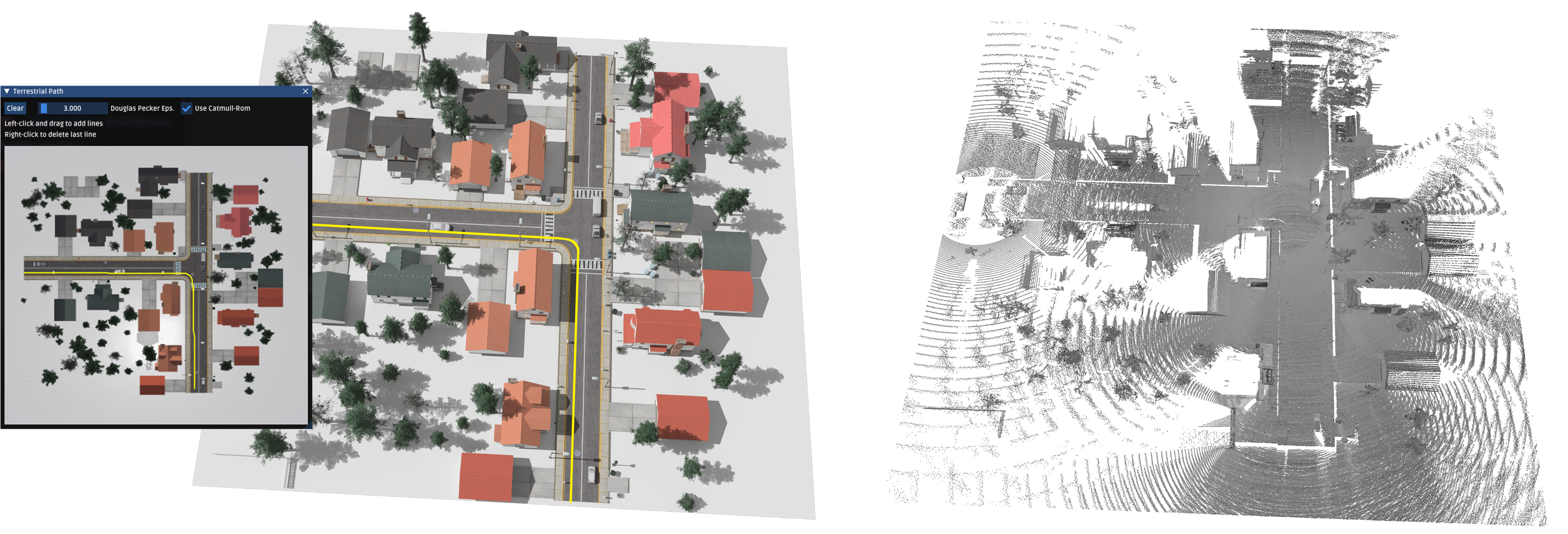
This research aims to mitigate this issue in the context of urban environments by combining real and synthetic LiDAR (Laser Detection and Ranging) point clouds. To this end, two initial hypotheses are proposed:
The performance of neural networks trained and tested on synthetic point clouds generated with virtual LiDAR is similar to the performance achieved using real point clouds.
Training neural networks with real point clouds can be replaced by training exclusively with synthetic data, yielding good results when tested on real point clouds.
Key aspects of the research address challenges such as the procedural generation of labeled city fragments, the use of a LiDAR simulator to create a synthetic dataset, and experimentation following the Knowledge Discovery in Databases (KDD) process with multiple neural networks: PointNet++, Point Transformer, and RepSurf.