Experimentación en framework para redes neuronales con diferentes conjuntos de datos LiDAR reales y sintéticos
Thesis overview
Author: Víctor Rodríguez-Cano
Supervision: Rafael-Jesús Segura-Sánchez, Alfonso López-Ruiz
Degree: Master's Degree in Computer Science
Institution: University of Jaén, Department of Computer Science
Defense: December 2024
Final grade: 10/10 (with honors)
Awards
- Best B.S./M.S. Thesis in the XXIV Edition of the International Award 'Francisco Coello' in Geomatics, University of Jaén, 2024
Abstract
A día de hoy el aprendizaje automático está aplicándose dentro de muchos sectores para resolver una infinidad de problemas de ingeniería, arquitectura, medicina, arqueología, geomática, etc. Sin embargo, el entrenamiento de estos modelos de aprendizaje automático requiere de una gran cantidad de datos correctamente procesados y etiquetados. Esta investigación tendrá como objetivo reducir este problema en el contexto de entornos urbanos, combinando el uso de nubes de puntos LiDAR (Laser Detection and Ranging) reales y sintéticas. Para ello se proponen 2 hipótesis iniciales que se tratarán de validar:
1) El comportamiento de las redes obtenido a partir de un entrenamiento y testeo con nubes de puntos sintéticas generadas con el LiDAR virtual es similar al obtenido a partir de nubes de puntos reales.
2) El entrenamiento de las redes neuronales con nubes de puntos reales puede ser sustituido con un entrenamiento alimentado con datos completamente sintéticos, dando buenos resultados en el testeo con nubes de puntos reales.
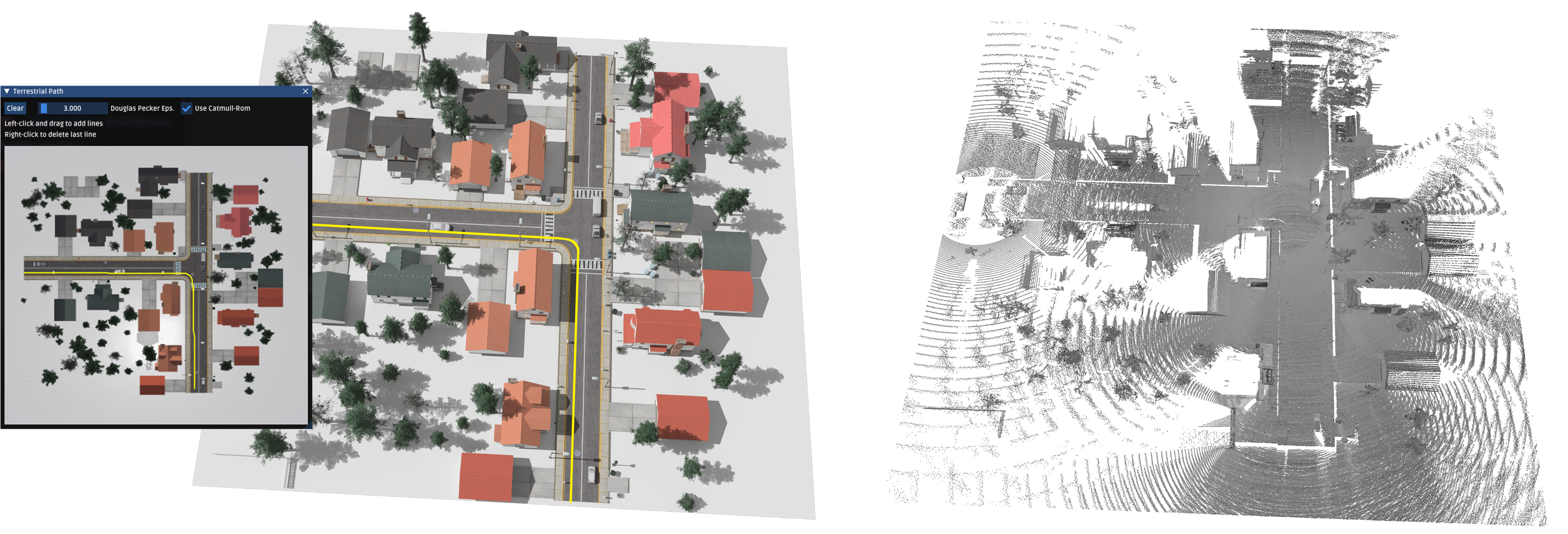
Entre los puntos más destacados, se abarcarán desafíos tales como la generación procedural de fragmentos de ciudades etiquetadas, la aplicación de un simulador LiDAR para la creación de un dataset sintético y la experimentación siguiendo el proceso Knowledge Discovery in Databases (KDD) con múltiples redes neuronales: PointNet++, Point Transformer y RepSurf.